ddensd
중립(Neutral) 유형의 지연 미분 방정식(DDE) 풀기
구문
설명
예제
2개의 지연을 갖는 중립 DDE
Paul이 제시한 다음과 같은 중립 DDE를 ![]() 에 대해 풉니다.
에 대해 풉니다.
![]()
해 내역은 ![]() 에 대해
에 대해 ![]() 입니다.
입니다.
편집기에서 새 프로그램 파일을 만듭니다. 이 파일에는 메인 함수와 4개의 로컬 함수가 포함됩니다.
1계 DDE를 ddefun이라는 로컬 함수로 정의합니다.
function yp = ddefun(t,y,ydel,ypdel) yp = 1 + y - 2*ydel^2 - ypdel; end
해 지연을 dely라는 로컬 함수로 정의합니다.
function dy = dely(t,y) dy = t/2; end
도함수 지연을 delyp라는 로컬 함수로 정의합니다.
function dyp = delyp(t,y) dyp = t-pi; end
해 내역을 history라는 로컬 함수로 정의합니다.
function y = history(t) y = cos(t); end
적분 구간을 정의하고 ddensd를 사용하여 DDE를 풉니다. 이 코드를 메인 함수에 추가합니다.
tspan = [0 pi]; sol = ddensd(@ddefun,@dely,@delyp,@history,tspan);
![]() 과
과 ![]() 사이에서 간격이 균일한 점 100개에서의 해를 구합니다. 이 코드를 메인 함수에 추가합니다.
사이에서 간격이 균일한 점 100개에서의 해를 구합니다. 이 코드를 메인 함수에 추가합니다.
tn = linspace(0,pi); yn = deval(sol,tn);
결과를 플로팅합니다. 이 코드를 메인 함수에 추가합니다.
plot(tn,yn); xlim([0 pi]); ylim([-1.2 1.2]); xlabel('time t'); ylabel('solution y');
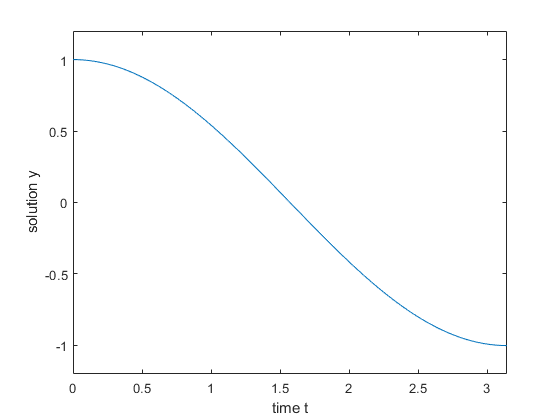
전체 프로그램을 실행하여 해를 계산하고 플롯을 표시합니다. 파일 ddex4.m에는 이 예제에 대한 전체 코드가 포함되어 있습니다. 명령줄에 edit ddex4를 입력하면 편집기에서 코드를 볼 수 있습니다.
입력 인수
출력 인수
세부 정보
알고리즘
이 솔버에 사용된 알고리즘에 대한 자세한 내용은 Shampine [2] 항목을 참조하십시오.
참고 문헌
[1] Paul, C.A.H. “A Test Set of Functional Differential Equations.” Numerical Analysis Reports. No. 243. Manchester, UK: Math Department, University of Manchester, 1994.
[2] Shampine, L.F. “Dissipative Approximations to Neutral DDEs.” Applied Mathematics & Computation. Vol. 203, Number 2, 2008, pp. 641–648.
버전 내역
R2012b에 개발됨
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)