Acoustic Noise Cancellation (LMS)
This example shows how to use the least mean square (LMS) algorithm to subtract noise from an input signal. The example uses a preconfigured Simulink® model. The LMS Filter block in the dspanc model models an adaptive filter that uses the reference signal at its Input port and the desired signal at the Desired port to automatically match the filter response. The LMS Filter block subtracts the filtered noise from the original signal. As the filter converges, the resultant error signal contains only the original signal.
Acoustic Noise Canceler Model
In the dspanc model used in this example, the signal output at the upper port of the Acoustic Environment subsystem is white noise. The signal output at the lower port is composed of colored noise and a signal from a WAV file. This model uses an adaptive filter to remove the noise from the signal output at the lower port. When you run the simulation, you hear both noise and a person playing the drums. Over time, the adaptive filter in the model filters out the noise so you hear only the drums.
Open the dspanc model by clicking the Open Model button.
Utilize Your Audio Device
Run the model and use your audio device to listen to the audio signal in real time (while running the simulation). The stop time is set to infinity, which allows you to interact with the model while it is running. For example, you can change the filter or alternate between slow adaptation and fast adaptation, and get a sense of the real-time audio processing behavior under these conditions.
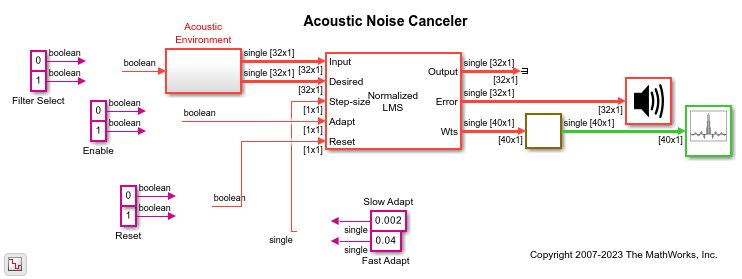

Color Codes of the Blocks
When you run the model, the color codes of the blocks in the model indicate how fast a block executes. In this model, the color red indicates the fastest discrete sample time (for example, the 8 kHz audio signal processing block in the Acoustic Environment subsystem) and the color green indicates the second fastest discrete sample time. You can see that the color changes from red to green in the Array Plot block after downsampling by 32. For more information on displaying sample time colors, see View Sample Time Information (Simulink).
Array Plot Scope
Double-click the Array Plot block to open the scope window and display the behavior of the coefficients of the adaptive filter. The window displays multiple samples of data at one time. These samples represent the values of the filter coefficients of a normalized LMS adaptive filter. The Array Plot window has toolbar buttons that enable you to zoom in on the displayed data, freeze the scope display, and save the scope position.
Acoustic Environment Subsystem
You can see the details of the Acoustic Environment subsystem by double-clicking the subsystem in the model. Gaussian noise is used to create the signal sent to the Exterior Mic output port. If the input to the Filter port changes from 0 to 1, the Digital Filter block changes from a lowpass filter to a bandpass filter. The filtered noise output from the Digital Filter block is added to the signal coming from a WAV file to produce the signal sent to the Pilot's Mic output port.
Available Example Versions
For a fixed-point version of this model, open the dspanc_fixpt model included with this example.
References
[1] Haykin, S., Adaptive Filter Theory, 3rd Ed., Prentice-Hall, 1996.
See Also
LMS Filter | Audio Device Writer | Array Plot
Related Topics
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)